







Ձախ ձեռքի կանոն, աջ ձեռքի կանոն, աջ ձեռքի կանոն:Ձախ կողմի կանոնը, սա շարժիչի ռոտացիայի ուժի վերլուծության հիմքն է:Պարզ ասած, դա մագնիսական դաշտում հոսանք կրող հաղորդիչն է, որի վրա ուժը կազդի:
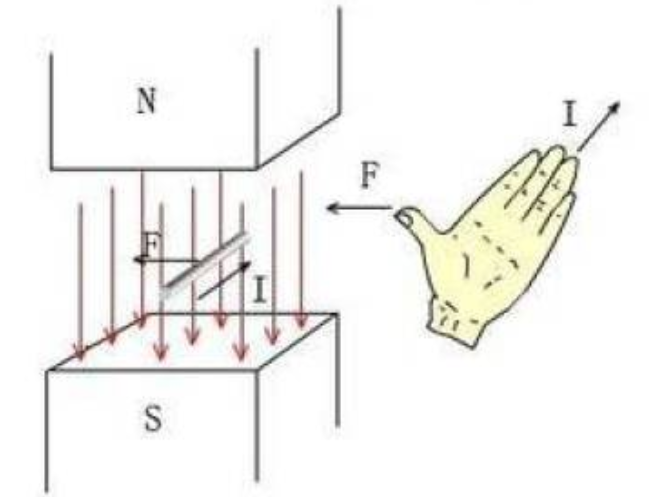
Թող մագնիսական դաշտի գիծն անցնի ափի առջևի միջով, մատների ուղղությունը հոսանքի ուղղությունն է, իսկ բթամատի ուղղությունը՝ մագնիսական ուժի ուղղությունը։Ուժի ձգումը կտրում է մագնիսական դաշտի գծերը՝ էլեկտրաշարժիչ ուժ առաջացնելու համար:
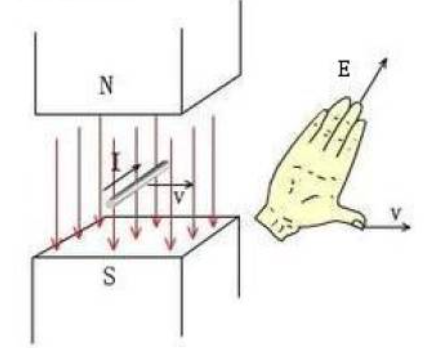
Թող մագնիսական դաշտի գիծը անցնի ափի միջով, բթամատի ուղղությունը շարժման ուղղությունն է, իսկ մատի ուղղությունը՝ առաջացած էլեկտրաշարժիչ ուժի ուղղությունը։Ինչու՞ խոսել առաջացած էլեկտրաշարժիչ ուժի մասին:Չգիտեմ, արդյոք դուք նման փորձ ունեք:Երբ դուք միացնում եք շարժիչի եռաֆազ լարերը և ձեռքով պտտում շարժիչը, կտեսնեք, որ դիմադրությունը շատ մեծ է:Դա պայմանավորված է նրանով, որ ինդուկցիան տեղի է ունենում շարժիչի պտտման ժամանակ:Էլեկտրաշարժիչ ուժը առաջացնում է հոսանք, իսկ մագնիսական դաշտում հաղորդիչի միջով հոսող հոսանքը կառաջացնի պտտման ուղղությանը հակառակ ուժ, և բոլորը կզգան, որ պտտման նկատմամբ մեծ դիմադրություն կա:
Եռաֆազ լարերը բաժանված են, և շարժիչը կարելի է հեշտությամբ շրջել
Եռաֆազ գծերը համակցված են, իսկ շարժիչի դիմադրությունը շատ մեծ է։Աջ պտուտակի կանոնի համաձայն՝ աջ ձեռքով բռնեք լարված էլեկտրամագնիսական սարքը, որպեսզի չորս մատները թեքվեն հոսանքի նույն ուղղությամբ, այնուհետև բթամատով մատնանշված ծայրը սնուցված էլեկտրամագնիսականի N բևեռն է։
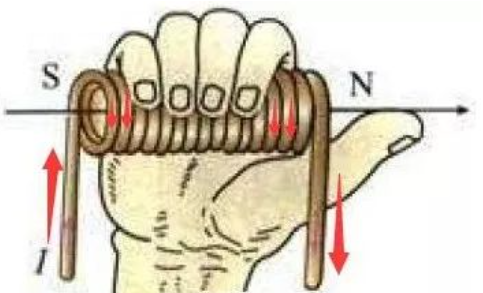
Այս կանոնը հիմք է հանդիսանում էներգիա ստացած կծիկի բևեռականության մասին դատելու համար, իսկ կարմիր սլաքի ուղղությունը ընթացիկ ուղղությունն է:Երեք կանոնները կարդալուց հետո եկեք դիտարկենք շարժիչի ռոտացիայի հիմնական սկզբունքները:Առաջին մասը. DC շարժիչի մոդել Մենք գտնում ենք DC շարժիչի մոդել, որն ուսումնասիրվել է ավագ դպրոցի ֆիզիկայում և իրականացնում ենք պարզ վերլուծություն մագնիսական շղթայի վերլուծության մեթոդի միջոցով:
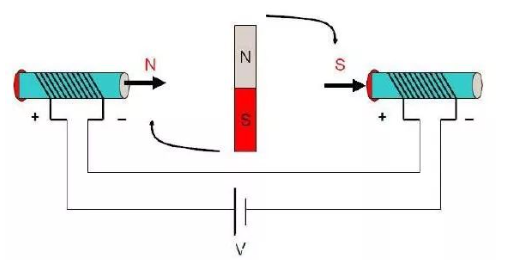
Վիճակ 1 Երբ հոսանք է կիրառվում երկու ծայրերում գտնվող ոլորանների վրա, ըստ աջ պտուտակի կանոնի, կստեղծվի կիրառվող մագնիսական ինդուկցիայի ինտենսիվություն B (ինչպես ցույց է տրված հաստ սլաքով), և մեջտեղում գտնվող ռոտորը կփորձի կատարել որքան հնարավոր է իր ներքին մագնիսական ինդուկցիայի գծի ուղղությունը:Արտաքին մագնիսական դաշտի գծի ուղղությունը համահունչ է ձևավորելու ամենակարճ փակ մագնիսական դաշտի գծի օղակը, որպեսզի ներքին ռոտորը պտտվի ժամացույցի սլաքի ուղղությամբ:Երբ ռոտորի մագնիսական դաշտի ուղղությունը ուղղահայաց է արտաքին մագնիսական դաշտի ուղղությանը, ռոտորի պտտման ոլորող մոմենտն ամենամեծն է։Նկատի ունեցեք, որ ասում են, որ «պահը» ամենամեծն է, այլ ոչ թե «ուժը»:Ճիշտ է, երբ ռոտորի մագնիսական դաշտը նույն ուղղությամբ է, ինչ արտաքին մագնիսական դաշտը, ռոտորի վրա մագնիսական ուժը ամենամեծն է, բայց այս պահին ռոտորը գտնվում է հորիզոնական վիճակում, իսկ ուժային թևը 0 է, և իհարկե այն չի պտտվի:Ավելացնենք, որ պահը ուժի և ուժի թևի արտադրյալն է:Եթե դրանցից մեկը զրո է, արդյունքը զրո է:Երբ ռոտորը վերածվում է հորիզոնական դիրքի, թեև նրա վրա այլևս չի ազդում պտտվող ոլորող մոմենտը, այն կշարունակի պտտվել ժամացույցի սլաքի ուղղությամբ՝ իներցիայի պատճառով:Այս պահին, եթե երկու solenoids-ի ընթացիկ ուղղությունը փոխվի, ինչպես ցույց է տրված ստորև նկարում, ռոտորը կշարունակի պտտվել:շրջվել առաջ ժամացույցի սլաքի ուղղությամբ,
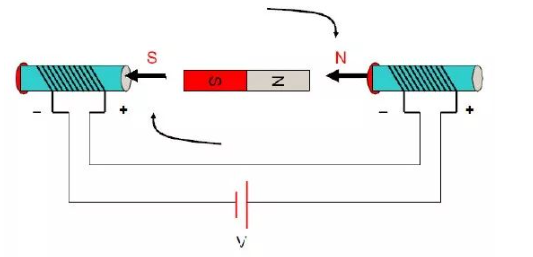
2-րդ վիճակում երկու solenoids-ի ընթացիկ ուղղությունը անընդհատ փոխվում է, և ներքին ռոտորը կշարունակի պտտվել:Հոսանքի ուղղությունը փոխելու այս գործողությունը կոչվում է կոմուտացիա։Կողմնակի նշում. Երբ փոխարկելը կապված է միայն ռոտորի դիրքի հետ և ուղղակիորեն կապված չէ որևէ այլ քանակի հետ:Մաս 2. Եռաֆազ երկբևեռ ներքին ռոտորի շարժիչ Ընդհանուր առմամբ, ստատորի եռաֆազ ոլորուններն ունեն աստղային միացման ռեժիմ և եռանկյուն միացման ռեժիմ, իսկ «եռաֆազ աստղային միացման երկու-երկու հաղորդման ռեժիմը» ամենատարածվածն է: օգտագործված, որն օգտագործվում է այստեղ։Այս մոդելը օգտագործվում է պարզ վերլուծության համար:
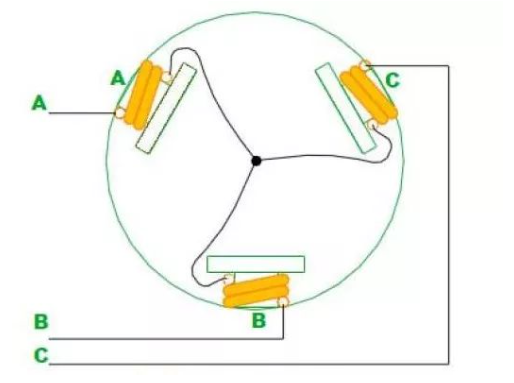
Վերևի նկարը ցույց է տալիս, թե ինչպես են միացված ստատորի ոլորունները (ռոտորը ներկայացված չէ որպես հիպոթետիկ երկբևեռ մագնիս), և երեք ոլորունները միացված են «Y» ձևով կենտրոնական միացման կետի միջոցով:Ամբողջ շարժիչը տանում է դեպի երեք լարեր՝ A, B, C: Երբ դրանք երկու-երկու սնուցվում են, կա 6 դեպք՝ AB, AC, BC, BA, CA, CB:Նկատի ունեցեք, որ սա կարգին է.
Այժմ ես նայում եմ առաջին փուլին. AB փուլը էներգիա է ստանում
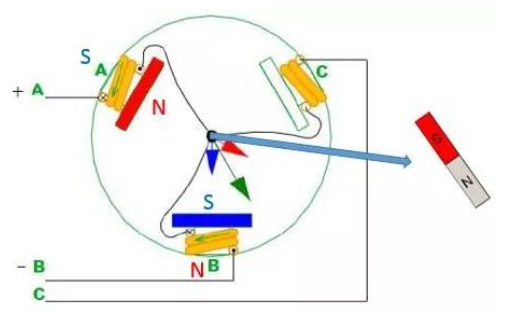
Երբ AB փուլը միացված է, A բևեռի կծիկի կողմից առաջացած մագնիսական դաշտի ուղղությունը ցույց է տրվում կարմիր սլաքով, իսկ B բևեռի կողմից առաջացած մագնիսական դաշտի գծի ուղղությունը ցույց է տրվում կապույտ սլաքով, այնուհետև ուղղությունը: արդյունքի ուժը ցույց է տրված կանաչ սլաքով, այնուհետև ենթադրելով, որ կա երկբևեռ մագնիս, N-բևեռի ուղղությունը կհամընկնի կանաչ սլաքով ցույց տված ուղղության հետ՝ համաձայն «միջին ռոտորը կփորձի պահպանել իր ներքին մագնիսական դաշտի գծերի ուղղությունը համահունչ արտաքին մագնիսական դաշտի գծերի ուղղությանը»:Ինչ վերաբերում է C-ին, ապա նա առայժմ կապ չունի նրա հետ։
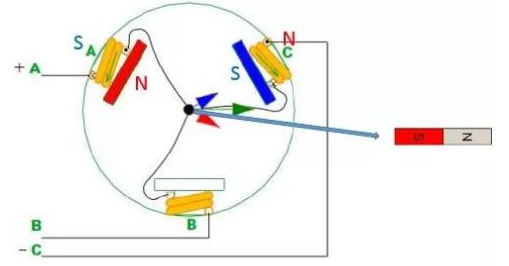
Փուլ 2. AC փուլը սնուցվում է
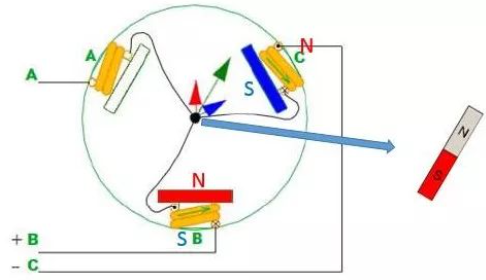
Երրորդ փուլը՝ BC փուլային էլեկտրաֆիկացում
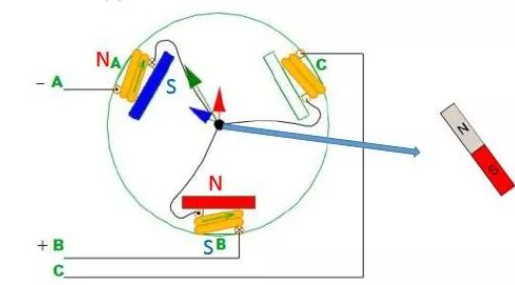
Երրորդ փուլ. BA փուլը էներգիա է ստանում
Ստորև ներկայացված է միջանկյալ մագնիսի (ռոտորի) վիճակի դիագրամը. Յուրաքանչյուր պրոցեսի ռոտոր պտտվում է 60 աստիճանով:

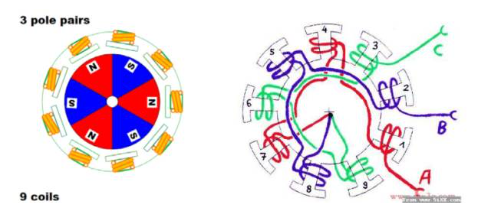
Ամբողջական ռոտացիան ավարտվում է վեց գործընթացներով, որոնցից վեց կոմուտացիաներ են կատարվում։Երրորդ մասը՝ եռաֆազ բազմաբևեռ բազմաբևեռ ներքին ռոտորային շարժիչ Դիտարկենք ավելի բարդ կետ:Նկար (ա) եռաֆազ ինը ոլորուն վեց բևեռ (եռաֆազ, ինը ոլորուն, վեց բևեռ) շարժիչ է:Հակառակ բևեռ) ներքին ռոտորի շարժիչը, դրա ոլորուն միացումը ներկայացված է նկարում (բ):Նկար (բ) նկարից երևում է, որ եռաֆազ ոլորունները նույնպես միացված են միմյանց միջանկյալ կետում, որը նույնպես աստղային միացում է։Ընդհանուր առմամբ, շարժիչի ոլորունների թիվը անհամապատասխան է մշտական մագնիսական բևեռների թվին (օրինակ, 6 ոլորուն և 6 բևեռի փոխարեն օգտագործվում է 9 ոլորուն և 6 բևեռ), որպեսզի կանխեն ստատորի ատամները և ռոտորի մագնիսները ներգրավվելուց և հավասարեցնելուց:
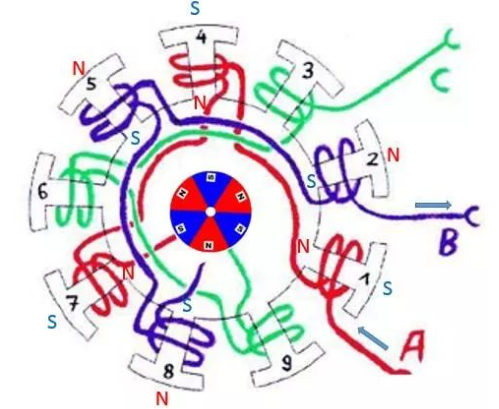
Նրա շարժման սկզբունքը հետևյալն է. ռոտորի N բևեռը և սնուցված ոլորուն S բևեռը ունեն հավասարեցման միտում, իսկ ռոտորի S բևեռը և լարված ոլորուն N բևեռը ունեն հավասարեցման միտում:Այսինքն՝ S-ն ու N-ը ձգում են միմյանց։Նշենք, որ այն տարբերվում է նախորդ վերլուծության մեթոդից:Դե, եկեք օգնենք ձեզ նորից վերլուծել այն:Առաջին փուլ. AB փուլը էլեկտրաֆիկացվում է
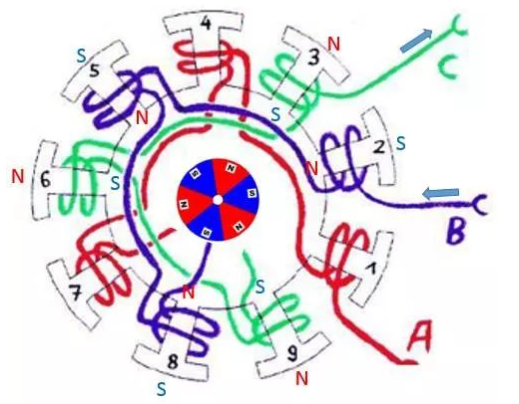
Փուլ 2. AC փուլը սնուցվում է

Երրորդ փուլը՝ BC փուլային էլեկտրաֆիկացում
Հրապարակման ժամանակը՝ հոկտ-21-2022